什么是散列
散列表(hash table)我们平时也叫它哈希表或者Hash表,它用的是数组支持按照下标随机访问数据的特性,所以散列表其实就是数组的一种扩展,由数组演化而来。可以说,没有数组就没有散列表。
比如我们有100件商品,编号没有规律的4位数字,现在我们想要通过编号快速获取商品信息,如何做呢?我们可以将这100件商品信息放到数组里,通过 商品编号%100这样的方式得到一个值,值为1的商品放到数组中下标为1的位置,值为2的商品,我们放到数组中下标为2的位置。以此类推,编号为K的选手放到数组中下标为K的位置。因为商品编号通过散列函数(编号%100)跟数据下标一一对应,所以但我们需要查询编号为x的商品信息的时候,我们使用同样的方式,将编号转换为数组下标,就可以从对应的数组下标的位置取出数据。
这就是散列的典型思想。
我们通过上面的例子可以得出这样规律:散列表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。通过散列函数(商品编号%100)把元素的键值映
射为下标,然后将数据存储在数组中对应下标的位置。当我们按照键值查询元素时,我们用同样的散列函数,将键值转化数组下标,从对应的数组下标的位置取
数据。
开放寻址
一说到散列(或者叫做hash表),大家更熟悉的是HashMap或者LinkedHashMap,而今天的主角是ThreadLocalMap,它是ThreadLocal中的一个内部类。分析ThreadLocal源码的时候不可能绕过它。
由于哈希表使用了数组,无论hash函数如何设计都无可避免存在hash冲突。上面的例子如果两件商品的id分别是1001和1101,那么他们的数据就会就会被放到数组的同一个位置,出现了冲突
鸽巢原理,又名狄利克雷抽屉原理、鸽笼原理。其中一种简单的表述法为:若有n个笼子和n+1只鸽子,所有的鸽子都被关在鸽笼里,那么至少有一个笼子有至少2只鸽子
ThreadLocalMap作为hash表的一种实现方式,它是使用什么方式来解决冲突的呢?它使用了开放寻址法来解决这个问题。
元素插入
开放寻址法的核心是如果出现了散列冲突,就重新探测一个空闲位置,将其插入。当我们往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,我们就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。
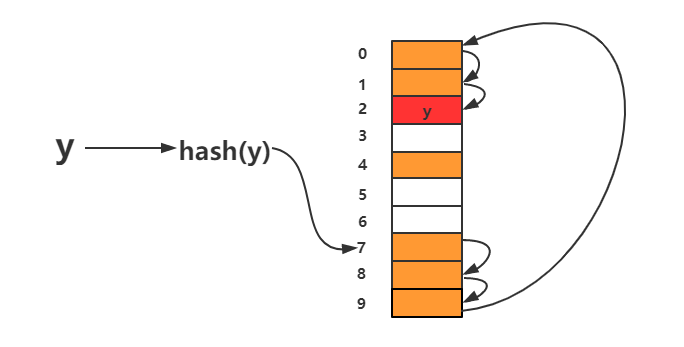
从图中可以看出,散列表的大小为 10 ,在元素 x 插入散列表之前,已经 6 个元素插入到散列表中。 x 经过 Hash 算法之后,被散列到位置下标为 7 的位置,但是这个位置已经有数据了,所以就产生了冲突。于是我们就顺序地往后一个一个找,看有没有空闲的位置,遍历到尾部都没有找到空闲的位置,于是我们再从表头开始找,直到找到空闲位置 2 ,于是将其插入到这个位置。
元素查找
在散列表中查找元素的过程有点儿类似插入过程。我们通过散列函数求出要查找元素的键值对应的散列值,然后比较数组中下标为散列值的元素和要查找的元素。如果相等,则说明就是我们要找的元素;否则就顺序往后依次查找。如果遍历到数组中的空闲位置,还没有找到,就说明要查找的元素并没有在散列表中。
元素删除
ThreadLocalMap跟数组一样,不仅支持插入、查找操作,还支持删除操作。对于使用线性探测法解决冲突的散列表,删除操作稍微有些特别。我们不能单纯地把要删除的元素设置为空。
还记得我们刚讲的查找操作吗?在查找的时候,一旦我们通过线性探测方法,找到一个空闲位置,我们就可以认定散列表中不存在这个数据。但是,如果这个空闲位置是我们后来删除的,就会导致原来的查找算法失效。本来存在的数据,会被认定为不存在。这个问题如何解决呢?
我们可以在删除元素之后,将之后不为null的数据rehash,这样就不会影响查询的逻辑
另一种方法是:可以将删除的元素,特殊标记为 deleted 。当线性探测查找的时候,遇到标记为 deleted 的空间,并不是停下来,而是继续往下探测
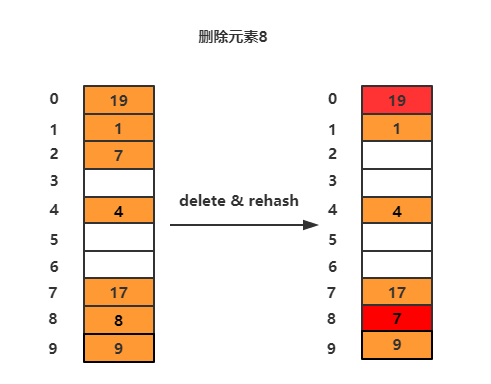
这里解释下rehash的过程:当删除元素8的时候,先把下标为8的值设置为null,然后将其后面不为空的数组元素rehash。比如8后面的元素是9,其原本应该的位置(9%10=9)就在9所以不移动。下一个元素是19,应该在下标为9的位置,但是已经被占用了,所以就找下一个空闲的位置,下标为3的位置是空闲的,放入tab[3]。接着下一个元素1就在tab[1]不移动,
元素7的位置在tab[7],因为已经被占用,放入下一个空闲位置tab[8]。下一个元素仍然是19,这里由于tab[9]已经被占用,所以放入下一个空闲位置tab[0]。接着最后一个元素4位置就在tab[4],所以不移动。元素4的下一个位置为空,整个rehash过程结束。
装载因子
你可能已经发现了,线性探测法其实存在很大问题。当散列表中插入的数据越来越多时,散列冲突发生的可能性就会越来越大,空闲位置会越来越少,线性探测的时间就会越来越久。极端情况下,我们可能需要探测整个散列表,所以最坏情况下的时间复杂度为 O(n) 。同理,在删除和查找时,也有可能会线性探测整张散列表,才能找到要查找或者删除的数据。
不管采用哪种探测方法,hash函数设计得在合理,当散列表中空闲位置不多的时候,散列冲突的概率就会大大提高。为了尽可能保证散列表的操作效率,一般情况下,我们会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:散列表的装载因子=填入表中的元素个数/散列表的长度 装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
源码分析
ThreadLocalMap定义
ThreadLocal的核心数据结构是ThreadLocalMap,它的数据结构如下:
1 | static class ThreadLocalMap { |
从ThreadLocalMap的定义可以看出Entry的key就是ThreadLocal,而value就是值。同时,Entry也继承WeakReference,所以说Entry所对应key(ThreadLocal实例)的引用为一个弱引用。而且定义了装载因子为数组长度的三分之二。
set()方法
1 | private void set(ThreadLocal<?> key, Object value) { |
上面源码的主要步骤如下:
- 采用线性探测法,寻找合适的插入位置。首先判断key是否存在,存在则直接覆盖。如果key不存在证明被垃圾回收了此时需要用新的元素替换旧的元素
- 不存在对应的元素,需要创建一个新的元素
- 清除entry不为空,但是ThreadLocal(entry的key被回收了)的元素,防止内存泄露
- 如果满足条件:size >= threshold - threshold / 4就将数组扩大为之前的两倍,同时会重新计算数组元素所处的位置并进行移动(rehash)。比如最开始数组初始大小为16,当size >= (16*2/3=10) - (10/4) = 8的时候就会扩容,将数组大小扩容至32.
无论是replaceStaleEntry()方法还是cleanSomeSlots()方法,最重要的方法调用是expungeStaleEntry(),你可以在ThreadLocalMap中的get,set,remove都能发现调用它的身影。
1 | private int expungeStaleEntry(int staleSlot) { |
上面rehash的代码结合文章开头的说明理解起来更是容易,当从ThreadLocalMap新增,获取,删除的时候都会根据条件进行rehash,条件如下
- ThreadLocal对象被回收,此时Entry中key为null,value不为null。这时会触发rehash
- 当阈值达到ThreadLocalMap容量的三分之二的时候
get()方法
1 | private Entry getEntry(ThreadLocal<?> key) { |
线性探测法贯穿了get,set的所有流程,理解了原理在看代码就很简单了。
remove()方法
1 | private void remove(ThreadLocal<?> key) { |
remove的时候回删除旧的entry,然后进行rehash.
ThreadLocal的使用
1 | public class Counter { |
运行效果如下:
1 | Thread-3 seqCount :1 |
ThreadLocal 其实是为每个线程都提供一份变量的副本, 从而实现同时访问而不受影响。从这里也看出来了它和synchronized之间的应用场景不同, synchronized是为了让每个线程对变量的修改都对其他线程可见, 而 ThreadLocal 是为了线程对象的数据不受其他线程影响, 它最适合的场景应该是在同一线程的不同开发层次中共享数据。